
 CC-BY 4.0
CC-BY 4.0
Introduction
How we move and interact with our environment can be guided by automatic tendencies (Marteau et al., 2012). For example, studies have shown that individuals approach images of physical activity faster than sedentary activities (Cheval et al., 2014; Cheval et al., 2018; Cheval et al., 2020; Farajzadeh et al., 2023a; Farajzadeh et al., 2024; Goubran et al., 2025). This bias in approaching and avoiding certain stimuli has been demonstrated in several contexts including food intake (Kemps et al., 2013; Lender et al., 2018), object ownership status (Barton et al., 2021; Roy et al., 2023), and facial expressions (Marsh et al., 2005). In addition, these approach-avoidance tendencies have been associated with behaviours detrimental to health, such as physical inactivity, smoking, overeating, and alcoholism (Cheval et al., 2020; Spruyt et al., 2013; Wiers et al., 2010; Wittekind et al., 2015, 2021).
A common method for assessing an individual’s approach-avoidance tendencies is the approach-avoidance task (Phaf et al., 2014; Solarz, 1960). A variant of this task has been used in studies investigating physical activity behaviour using images of physical and sedentary activities (Cheval et al., 2018; Farajzadeh et al., 2023a; Farajzadeh et al., 2024). Results consistently showed a bias: Approach responses were generated earlier for images of physical activity than for images of sedentary activity, whereas avoidance responses were earlier for sedentary activity than for physical activity, regardless of age (Farajzadeh et al., 2023a). Importantly, this variant used neutral stimuli to account for potential generic biases towards approach and avoidance movements (e.g., faster avoidance responses regardless of stimulus) (Farajzadeh et al., 2023a).
In approach-avoidance tasks, interfaces such as joysticks, mice, and keyboards are commonly used to characterise behavioural performance based on reaction times (Krieglmeyer & Deutsch, 2010; Phaf et al., 2014; Wittekind et al., 2021). However, other kinematic measures such as movement speed and acceleration may contribute to a better understanding of approach-avoidance tendencies. A good example is the study by Barton et al. (Barton et al., 2021), who used the approach-avoidance task to examine a potential bias towards self-owned objects. They found a significant bias in reaction time for both congruent (approaching self-owned or avoiding experimenter-owned objects) and incongruent (approaching experimenter-owned or avoiding self-owned objects) mappings. However, this bias in movement duration (i.e. distance over time - speed) was only significant for the congruent mapping. Therefore, examining different measures of movement can provide a more complete characterisation of the influence that biases can have on behaviour.
In this technical report, we describe the Kinarm Approach-Avoidance Task (KAAT), a variant of the approach-avoidance task, that leverages the capabilities of robotics to better assess behaviour. The KAAT has been developed for the Kinarm Endpoint system to provide a wealth of kinematic data to characterize approach-avoidance tendencies. The stimuli used in this task can be chosen according to the objectives of a study (e.g., approach-avoidance bias for smoking-related images, alcohol-related images, high vs. low-calorie food images, gambling-related images). Here, for the sake of illustration, we used stimuli depicting physical activities (e.g., running, swimming) and sedentary activities (e.g., lounging in a hammock, watching TV). Participants are given cues to either quickly reach towards the stimulus location (‘Approach’) or to reach in the opposite direction (‘Avoid’). The KAAT assesses both arms and quantifies centre-out reaching in 12 different directions to dissociate approach-avoidance tendencies from the bias towards specific arm motions, such as flexion versus extension (Cacioppo et al., 1993) or pushing versus pulling (Chen & Bargh, 1999; Wittekind et al., 2021). Resistive loads can be applied during reaches toward certain visual stimuli for the experimental manipulation of physical effort during reaching and for rehabilitation protocols aimed at strengthening or weakening specific approach-avoidance tendencies (Farajzadeh et al., 2023a; Farajzadeh et al., 2023b; Marteau et al., 2012).

Figure 1. (A) The Kinarm Approach-Avoidance Task (KAAT) on the Kinarm Endpoint laboratory. (B) A trial in the KAAT for the Neutral Stimulus condition with a Square Stimulus appearing in the west direction and the open circle appearing in the opposite direction (east). The dashed circles are didactic to indicate possible target locations and are not visible to the participant. The virtual hand is not visible to the participant during the task as participant’s real hand is occluded by the opaque screen.
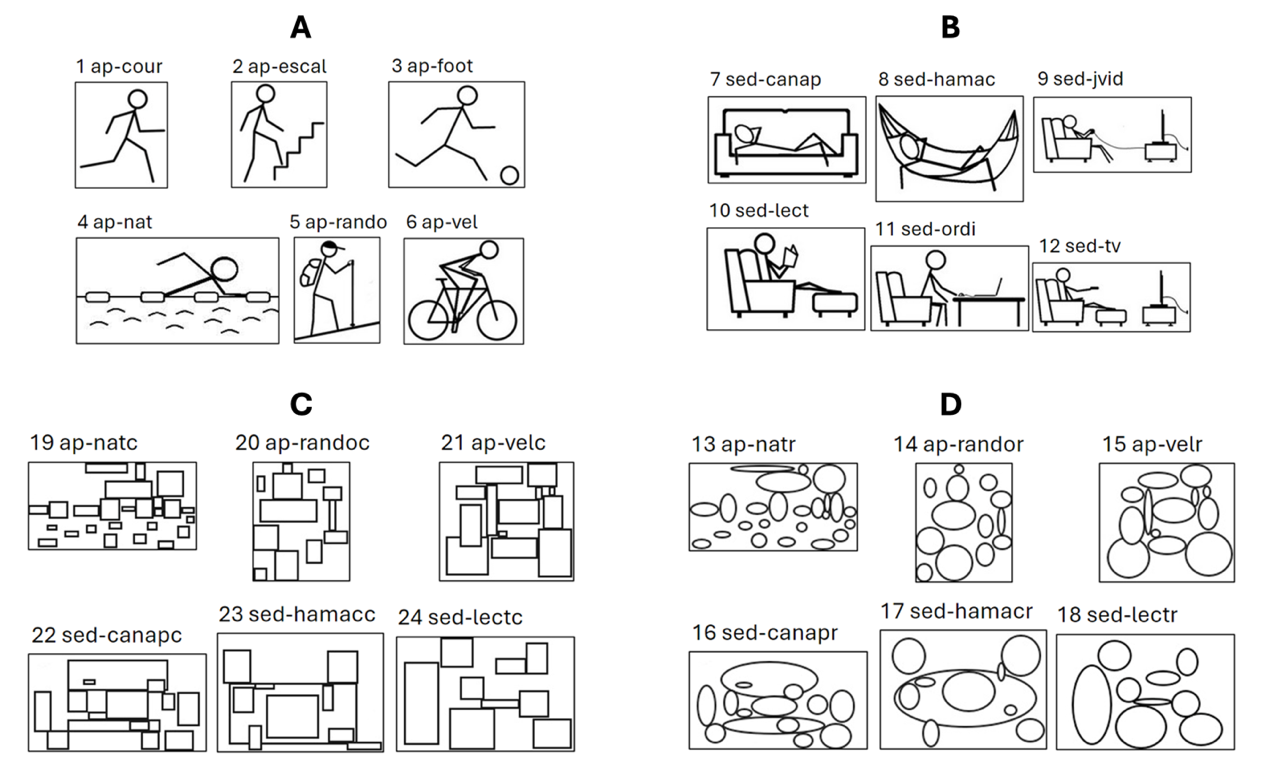
Figure 2. (A) Images depicting physical activities used as ’Active Stimulus’. (B) Images depicting sedentary activities used as ’Sedentary Stimulus’. (C) Images used as ’Circle Stimulus’. (D) Images used as ’Square’ Stimulus’. Each image label corresponds to the filename and each image number corresponds to the Trial Protocol used in Dexterit-E.
Kinarm Endpoint Laboratory
Since the 2000s, robotic technologies have been developed to improve the quantification of human behaviour in research and clinical settings (e.g., Howard et al., 2009; Reichenbach et al., 2013; Shirota et al., 2017; Zbytniewska et al., 2019). One such technology, the Kinarm Endpoint Laboratory, is specifically designed to measure upper limb movements. This platform is a haptic robot with handles that participants can grasp and move along the horizontal plane in an augmented reality environment (Scott, 1999) (Figure 1A). A screen is positioned above the handles and provides participants with information about the position of their hands along the same horizontal plane. Participants’ movements and forces are tracked by motors attached to the handles via mechanical linkages providing kinematic data. This robotic interface provides greater degrees of freedom for participants than joysticks, mice, or keyboards. Custom tasks have been developed to assess behaviour in healthy participants and to identify impairments across various conditions, such as stroke, Parkinson’s disease, kidney disease, and epilepsy (Bourke et al., 2016; Gaprielian et al., 2022; Lowrey et al., 2022; Simmatis et al., 2020; Vanderlinden et al., 2022). Thus, this robotic device has proven to be an effective tool for quantifying behaviour and cognitive function.
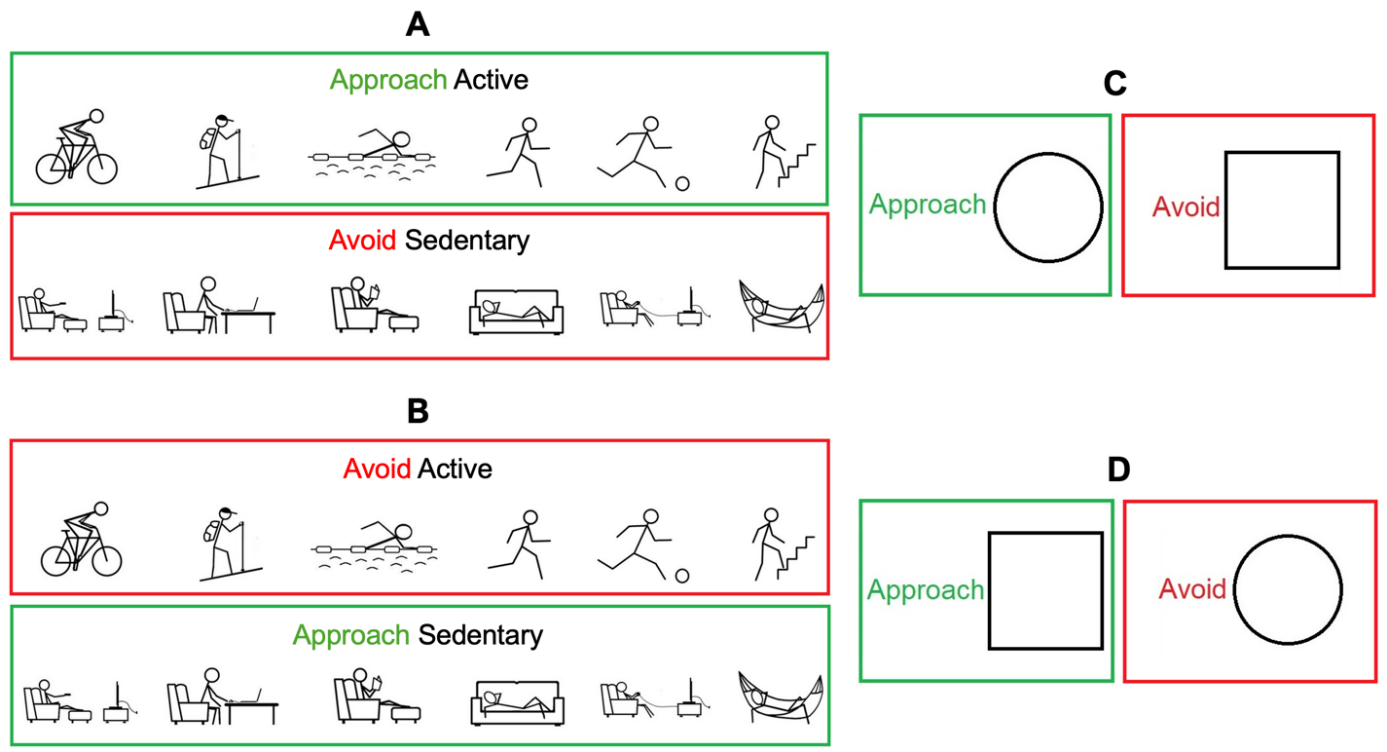
Figure 3. Instruction images shown to participants before (A) an Approach Active Stimulus block, (B) an Approach Sedentary Stimulus block, (C) an Approach Circle Stimulus block, and (D) an Approach Square Stimulus block.
Kinarm Approach-Avoidance Task Layout
The KAAT was developed on MATLAB (The MathWorks, Inc., version 2019b) and tested on Dexerit-E software (version 3.10, Kinarm, Kingston, Ontario). This variant of the approach-avoidance task employs a 12-target centre-out reaching design (Figure 1B) to assess upper limb movements in response to visual stimuli. 24 images were used as visual stimuli (Figure 2). 12 experimental images (‘Experimental Stimulus’) categorized as follows: 6 images of physical activities (‘Active Stimulus’; Figure 2A), 6 images of sedentary activities (‘Sedentary Stimulus’; Figure 2B). 12 neutral images (‘Neutral Stimulus’): 6 images made of ellipses (‘Circle Stimulus’; Figure 2C) and 6 images made of rectangles (‘Square Stimulus’; Figure 2D) that were designed to match the number and shape in three physical activity images (swimming, hiking, cycling) and three sedentary images (couch, hammock, reading). 2 different actions were tested (‘Movement’): reaching towards a stimulus (‘Approach’) and reaching towards the open circle in the opposite direction (‘Avoid’). Both arms were assessed in a single session. The visual stimulus could appear in 1 out of 12 possible target locations (Figure 1B). At the beginning of each block, instruction images informed the participants about the Movement-Stimulus pairing for the upcoming block (Figure 3).

Figure 4. Flowchart depicting the operation of the KAAT. Arrow direction indicates the next step in the task. Dashed arrows represent alternative outcomes.
Task Operation
Sequence of events in the Kinarm Approach-Avoidance Task
The task begins with the display of an instruction image, after which the participant places the cursor of either hand in a specified target (Figure 5A). When the ‘Start Target’ appears, the participant moves their hand to it. Peripheral targets are then displayed, prompting the participant to respond. If the participant does not reach a target within 3000 ms, the trial ends. If they successfully reach a target within the allotted time, the task continues as either an ‘Approach Trial’ or an ‘Avoid Trial’. On incorrect trials (i.e., reaching a Circle Stimulus when the instruction was to approach the Square Stimulus), the text ‘Incorrect’ is displayed before the trial ends. The system checks whether the trial is the last in the block. If it is not, the task continues to the next trial. If it is the last trial, another check determines whether it is the final block. If the final block has been completed, the KAAT ends. Otherwise, the task progresses to the next block. This structured sequence of actions, decision points, and feedback mechanisms is illustrated in Figure 4. The following sections describe this sequence in more detail.
Starting a block
The task must be run with the ‘Arm to be assessed’ as ‘Right’. After starting the task, participants are shown 1 out of 4 instruction images informing them of the condition (Figure 3). The block begins once the participant places either cursor (represented by a white circle of 0.5 cm radius) into the open green circle (1 cm radius) at the center of the workspace under the text ‘Place either hand in the circle to start’ (Figure 5A).
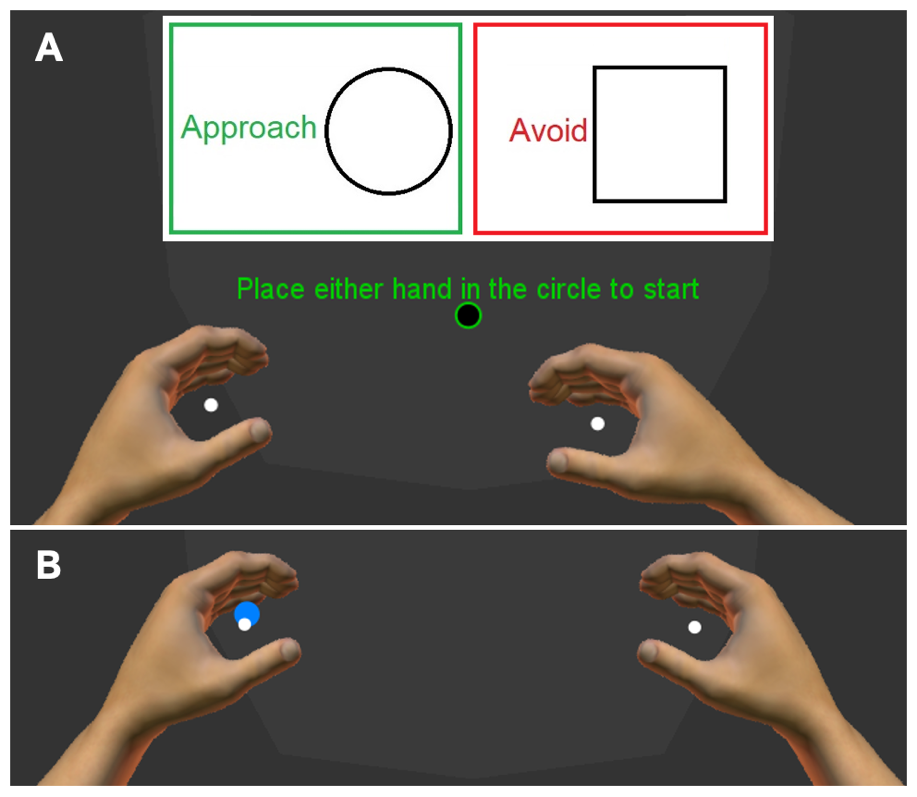
Figure 5. (A) Image taken at the start of a block. This block displays the Approach-Circle (Avoid-Square) instruction with an open green circle available for participants to move the cursor of either hand in to begin. (B) Start of a trial. This trial displays the blue Start target in the left side of the workspace and the participant placing their left arm into to begin the trial.
Starting a trial
At the beginning of each trial, a Start target (blue circle of 1 cm radius) appeared on the left or right side of the workspace with an equal probability (Figure 5B). After the participant placed the appropriate cursor (i.e., blue target on the left side of the workspace requires the left-hand cursor) on the Start target and held this position for 500-750 ms (randomised time), a stimulus (2.5 cm radius circle) appears in 1 of the 12 possible locations 10 cm from the Start target. Location 1 is east of the Start target, and the location for each subsequent target increases 30 degrees counterclockwise from this location (Location 4 is north, 7 is west, and 10 is south). In addition, a target (open circle of 2.5 cm radius) appears in the opposite location (i.e., if the target is in Location 1, the open circle is in Location 7). If participants do not hold the Start target for the 500-750 ms, they must re-enter the Start target and, again, hold it for 500-750 ms for the peripheral targets to appear. If participants did not reach the Start target within 3000 ms, the trial is marked as timed out, a yellow text ‘Too slow’ is displayed, and the trial ends.
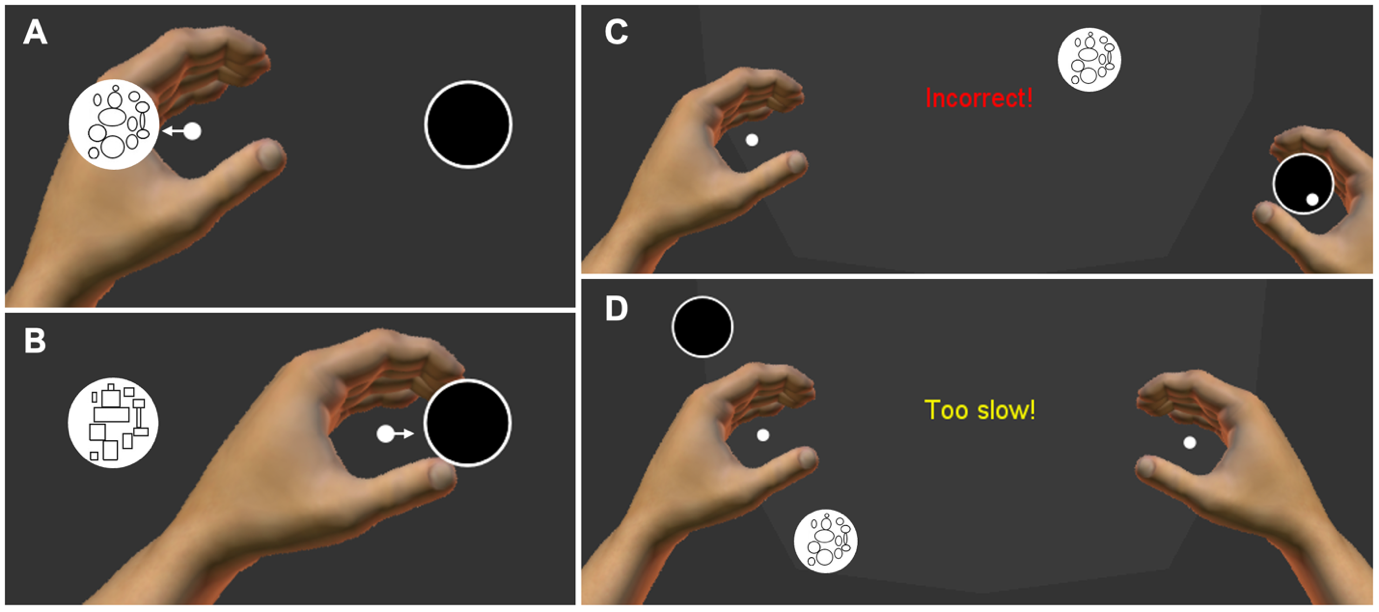
Figure 6. Illustration of trials of an Approach Circle block. (A) Left hand correctly approaching the Circle Stimulus (white arrow not shown to participants). (B) Left hand correctly avoiding the Square Stimulus by reaching towards the open circle (white arrow not shown to participants). (C) Incorrect reach to the open circle resulting in an ‘Incorrect!’ text. (D) No reach towards any target resulting in a ‘Too slow!’ text.
Reaching
An approach trial is successful when the cursor is placed in any portion of the appropriate Experimental Stimulus (Figure 6A). An avoidance trial is successful when the participant’s cursor moves into any portion of the open circle (Figure 6B). On an incorrect trial (e.g., cursor inside the Square Stimulus when the instruction was to approach the Circle Stimulus), the red text ‘Incorrect!’ appears (Figure 6C). If the participant does not reach to any peripheral target within 3000 ms, the yellow text ‘Too slow!’ appears (Figure 6D). After 1100 ms of a correct trial and 1500 ms of an incorrect trial, a new Start target appears for the next trial to begin.
The KAAT has a function to apply a mechanical force to the arm when the cursor is within a certain distance of a stimulus. For example, the robot can apply a resistive load of 1 N within a 9-cm radius of the target (Figure 7).
End of a block
After 48 trials, the block ends, a new block starts, and instruction image appears.
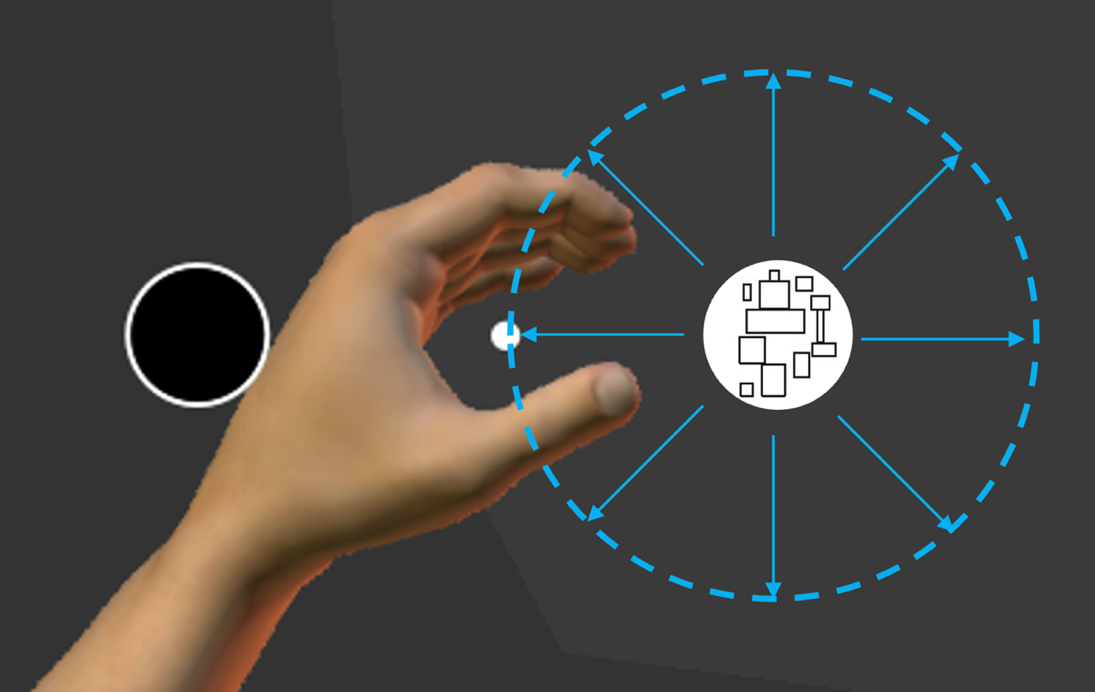
Figure 7. Illustration of the mechanical force that can be applied to the hand (blue arrows) if the participant moves their cursor (small white circle) within a 9-cm radius from the middle of the Square Stimulus (dashed blue circle). The arrows and dashed circle are not shown to the participant.
Task Specifications
General tab
In the General tab (Supplementary Material 1), the ‘Customized instructions’ in the ‘Task instructions’ has an explanation of the task for the participant that will display on the examiner’s screen after pressing the play button. In the ‘General protocol information’ section, the Code is set to KAAT (Kinarm Approach Avoidance Task). ‘Hand feedback behaviour’ should be set to Both hands. ‘Pause/unpause behaviour’ should be set to Pause at next trial. ‘Advanced options’ should have both ‘Use repeat trial flag’ and ‘Use random seed’ checked on.
Target Table tab
In the Target Table tab (Supplementary Material 2), we assign all the relevant targets and labels used in the task.
Target assignment
Target 1 is a circle used for the Start target.
Target 2 is a circle used for the Avoid target.
Target 3 is a circle used to start a block.
Target 4 is a label used to display text.
Target 5 is a rectangle that displays the instruction image.
Targets 6-11 are circles that display Active image targets.
Targets 12-17 are circles that display Sedentary image targets.
Targets 18-23 are circles that display Circle image targets.
Targets 24-29 are circles that display Square image targets.
Target specifications
Targets 1-3 and 6-29 use Visual Radius for their circle size.
Targets 2 and 3 use Next Colour for their outline colour.
Target 4 uses Initial Colour, Next Colour, and Third Colour for label colours.
Target 5 is the instruction image target that can display 1 of 4 images found in Initial Colour (Approach-Active), Next Colour (Approach-Sedentary), Third Colour (Approach-Circle), and FourthColour(Approach-Square).
Targets 1, 6-29 use Initial Colour to display their images/colours.
The X column is left empty as we manually assign this value in the Task Wide Parameters tab (see below). The Visual Radius only applies to circle targets. The Target X Length and Target Y Length only apply to rectangle targets.
Trial Protocol (TP) Table tab
The Trial Protocol (TP) Table (Supplementary Material 3) assigns the targets used for the task and specifies which stimulus has a forcefield around them (Toggle Field). The first five columns each point to a single target that is consistent for all TP (e.g., all of column 1 points to target 1, all of column 2 points to target 2, etc.). The Approach Target column points to Targets 6-29 to display the different images. The CS or AS column is set to 0 to identify which TP are Circle and Square images or 1 to identify the Active and Sedentary images. The Toggle Field column can be set to either 0 to apply no forcefield or 1 to apply a forcefield to the targets listed in the Approach Target column. In the current KAAT, the forcefield is applied to Sedentary and Square images.
Task Wide Parameters tab
The parameters set in the Task Wide Parameters tab (Supplementary Material 4) dictate the layout and flow of the task. Avoid Distance Adjustment scales the distance needed to move to the Avoid target (0-100%). Distance From Midline adjusts the distance (cm) that the Start target and peripheral targets appear relative to the midline (middle of workspace is 0 cm). Error Delay refers to the duration (ms) for which the ‘incorrect’ or ‘timed out’ labels are displayed. Hold Delay is the duration (ms) for which the cursor must remain at the Start target for a peripheral target to appear. Maximum Force is the strength of the forcefield (N). Maximum Background Force is the strength of background forces that push the hands towards the midline (N). No background load is currently used. Ramp Duration is the time (ms) given for forcefields to ramp up and down to the Maximum Force (half the duration is ramp up and half is ramp down). Reach Time is the maximum allotted time (ms) for reaching the peripheral target. Starting Delay is a random value from 0 to the value in Start Delay (ms) added to Hold Delay. Success Delay is the time (ms) the peripheral target is shown after a trial. Target Distance is the distance (cm) from the centre of the Start Target to the centre of the peripheral or the avoid target. Avoid Distance Adjustment scales this value for the avoid target. Trial Time is the time (ms) allowed to reach the Start target before timing out.
Block Table tab
The Block Table (Supplementary Material 5) must follow strict guidelines. First, a single block must contain the same Stimulus [only Neutral TP 13-24 (Circle/Square) or only Experimental TP 1-12 (Active/Sedentary)]. Second, the TP list must contain 12 values. Last, the value for List Reps must be 4 and Block Reps must be 1 and ‘Randomized’ must be checked on.
To assess all Movement-Stimulus pairings, each Stimulus must be run twice. The Movement-Stimulus pairings are assigned as follows: 1) The first instance of a Stimulus will be randomly assigned 1 of the 2 Movements (50% chance for Approach or Avoid), 2) The next block of the same Stimulus will have the opposite Movement. An example of a task sequence for 4 blocks can be as follows: Block 1 is Approach-Circle, Block 2 is Approach-Active, Block 3 is Approach-Sedentary, and Block 4 is Approach-Square.
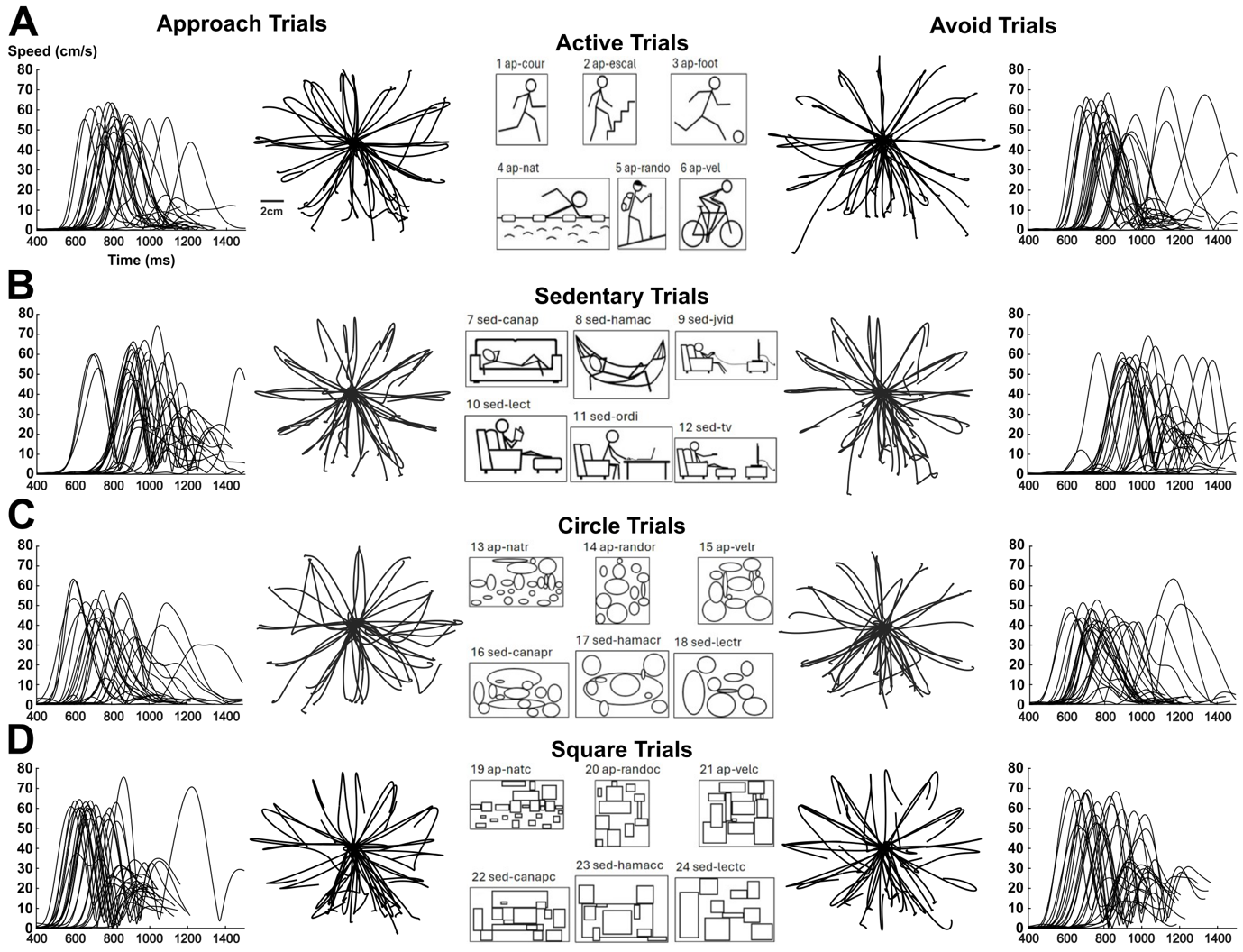
Figure 8. Hand paths and hand speeds of an exemplar performing the KAAT. The two columns on the left display KAAT performance for Approach trials and the two columns on the right display Avoid trials. The central column illustrates the stimuli the participants were instructed to approach or avoid. Hand paths for each direction of reach are shown in the 2nd and 4th columns. Hand speed is displayed in columns 1 and 5. Data is displayed from the time period that the Approach and Avoid targets appeared (0 ms) until the end of the trial (correct target reached). Each plot presents data of the left and right arms grouped together.
Pilot Data
Hand paths and speeds of a participant performing the KAAT are shown in Figure 8. The participant displayed relatively straight hand paths towards each direction of reach, and they displayed variability in speed from trial to trial. There was a general trend for reaches to be initiated faster for Neutral Stimulus (Circle and Square) than for Active Stimulus and Sedentary Stimulus.
Pilot data from a sample of 5 individuals (1 female, 4 males, mean age = 31.1 ± 6.7 years, age range = 28-45 years) were used to compute kinematic parameters (Table 1). Reaction Time was calculated as the difference between the time of peripheral target appearance and movement onset, defined as the first point in time the hand speed reached 10% of the Maximum Speed for each trial. Maximum Speed was calculated as the highest hand speed from peripheral target appearance to trial end. Maximum Acceleration was calculated as the highest hand acceleration from peripheral target appearance to trial end. Speed Peaks were identified as each point in time where the hand speed was higher than both the previous and subsequent time points. Errors were identified as a trial in which the participant placed their cursor inside the incorrect stimulus (e.g., cursor in the Circle Stimulus during an Avoid Circle block) divided by the total amount of trials performed. To control for a potential generic approach or avoidance bias (Farajzadeh et al., 2023a), we subtracted the participant’s mean value for the Approach Neutral Stimulus condition from the values of the Approach Active Stimulus and the values of the Approach Sedentary Stimulus condition. Similarly, the participant’s mean value for the Avoid Neutral Stimulus condition was subtracted from each trial of the Avoid Active Stimulus and Avoid Sedentary Stimulus condition.
If our study were based on a larger sample of participants, results based on Reaction Time differences might suggest a bias towards approaching physical activity, as participants were faster at approaching than avoiding images depicting physical activity (110 vs. 117 ms) (Table 1). In contrast, Reaction Time differences were similar for approaching and avoiding Sedentary Stimuli, suggesting no bias towards sedentary behaviour. However, results based on speed and acceleration would challenge this latter result. Indeed, greater Maximum Speed difference, greater Speed Peak difference, and greater Maximum Acceleration difference when avoiding compared to approaching Sedentary Stimuli would suggest a bias towards avoiding Sedentary Stimuli (Table 1). These results are consistent with previous literature (Cheval et al., 2014; Cheval et al., 2018; Cheval et al., 2020; Farajzadeh et al., 2023a; Farajzadeh et al., 2024; Goubran et al., 2025).
Table 1. Sample parameters of kinematic data (n = 5)
|
Movement |
Stimulus |
Mean |
SD |
Range |
Difference Measure |
||
|---|---|---|---|---|---|---|---|
|
Reaction Times (ms) |
|||||||
|
Approach |
Active |
691 |
182 |
504-1297 |
110 |
||
|
Sedentary |
724 |
184 |
521-1330 |
143 |
|||
|
Neutral |
581 |
163 |
393-1170 |
||||
|
Avoid |
Active |
734 |
165 |
535-1240 |
117 |
||
|
Sedentary |
762 |
190 |
546-1288 |
145 |
|||
|
Neutral |
617 |
143 |
447-1165 |
||||
|
Maximum Speed (cm/s) |
|||||||
|
Approach |
Active |
54.93 |
8.36 |
38.00-75.00 |
2.42 |
||
|
Sedentary |
56.65 |
8.26 |
39.80-75.80 |
4.14 |
|||
|
Neutral |
52.51 |
9.87 |
30.20-75.80 |
||||
|
Avoid |
Active |
56.52 |
8.06 |
42.00-75.60 |
3.26 |
||
|
Sedentary |
59.36 |
7.43 |
43.80-74.20 |
6.11 |
|||
|
Neutral |
53.26 |
9.37 |
29.40-75.60 |
||||
|
Maximum Acceleration (cm/s2) |
|||||||
|
Approach |
Active |
578 |
127 |
374-886 |
37 |
||
|
Sedentary |
629 |
132 |
381-920 |
88 |
|||
|
Neutral |
541 |
167 |
200-984 |
||||
|
Avoid |
Active |
590 |
140 |
341-935 |
55 |
||
|
Sedentary |
647 |
133 |
410-967 |
111 |
|||
|
Neutral |
536 |
158 |
216-919 |
||||
|
Speed Peaks (# of peaks) |
|||||||
|
Approach |
Active |
1.09 |
0.30 |
1.00-2.20 |
-0.02 |
||
|
Sedentary |
1.16 |
0.40 |
1.00-2.60 |
0.05 |
|||
|
Neutral |
1.11 |
0.22 |
1.00-1.60 |
||||
|
Avoid |
Active |
1.06 |
0.21 |
1.00-1.80 |
-0.02 |
||
|
Sedentary |
1.17 |
0.39 |
1.00-2.60 |
0.09 |
|||
|
Neutral |
1.08 |
0.31 |
1.00-2.60 |
||||
|
Errors (%) |
|||||||
|
Approach |
Active |
1.04 |
17.89 |
0.00-2.10 |
-0.01 |
||
|
Sedentary |
0.63 |
12.25 |
0.00-1.05 |
-0.42 |
|||
|
Neutral |
1.05 |
14.49 |
1.04-1.05 |
||||
|
Avoid |
Active |
0.21 |
4.08 |
0.00-1.04 |
-0.21 |
||
|
Sedentary |
1.05 |
14.92 |
0.00-3.16 |
0.63 |
|||
|
Neutral |
0.42 |
5.80 |
0.00-1.05 |
||||
The KAAT is a bimanual multidirectional reaching task developed on the Kinarm Endpoint robot to quantify approach-avoidance tendencies towards visual stimuli. This technical report describes an overview on the images displayed in this variant of the KAAT, details of the operation to guide new users, and specifications on the backend details for users to modify the task. Pilot data and preliminary analysis of the KAAT highlight kinematic parameters that can be used to characterize approach-avoidance tendencies.
Most approach-avoidance tasks have used either a keyboard, joystick, computer mouse, or touch screen, to assess approach-avoidance tendencies towards 2 directions of movement. The KAAT quantifies approach-avoidance tendencies using 24 reach directions, increasing difficultly due to greater uncertainty in stimulus location and the motor command to be implemented, which results in longer reaction times (Burke et al., 2017; Kaufman et al., 1970; Xu et al., 2012). Further, our design included neutral stimuli, which allowed for the control of a potential generic approach or avoidance bias (Farajzadeh et al., 2023a). Future validation work is therefore needed to examine how results in the KAAT compare with other versions of the approach-avoidance task.
Here, the KAAT was used to assess approach-avoidance tendencies towards physical activity and sedentary behaviours. However, the KAAT could be easily adapted for different goals since any image can be displayed to participants simply by changing the image files. Therefore, the KAAT can contribute to characterize health conditions such as social anxiety, depression, alcoholism, and eating disorders which has typically focused on reaction time (Heuer et al., 2007; Lender et al., 2018; Spruyt et al., 2013; Struijs et al., 2017). Further, the KAAT can refine this characterisation of human behaviour through the high sampling rate of upper limb motion - beyond what can be achieved with key presses or joystick manipulations commonly used in previous versions of the approach-avoidance task. This refined characterisation is important as some of these health conditions have been associated with sensorimotor impairments (Ben-Pazi et al., 2011; Emck et al., 2011; Northoff, 2024; Van Damme et al., 2015a; Van Damme et al., 2015b). Our pilot data highlights approach-avoidance tendencies for reaction time and movement speed. In addition, parameters such as speed peaks, which represent a change in movement direction, and acceleration, which represents movement vigor, may provide useful measures to further investigate the links between approach-avoidance tendencies, sensorimotor impairments, and health behaviours (Djamshidian et al., 2012; Kucinski et al., 2018; Mestre et al., 2013).
Limitations
As the aim of this technical report is to describe a novel method for assessing approach-avoidance tendencies using robotics, we did not conduct hypothesis testing on our small sample size. Thus, our interpretation of the results is strictly descriptive and future work with larger samples are required to have adequate power for statistical testing.
The KAAT has been designed and tested using images of physical activity and sedentary behaviour that have been previously validated and used for an approach-avoidance task conducted on a computer-based system (Cheval et al., 2018; Farajzadeh et al., 2023a; Farajzadeh et al., 2024; Goubran et al., 2025). Whether these images effectively represent physical activity and sedentary behaviour across cultural, societal, economic, and environmental contexts remains to be examined. This potential bias of the stimuli used here to illustrate the KAAT could be mitigated by selecting other images that more accurately represent physical activity in the specific context under investigation.
Contributions
Based on the Contributor Roles Taxonomy (CRediT) (Allen et al., 2019), individual author contributions to this work are as follows: Kayne Park: Methodology, Software, Visualization, Writing – Original Draft; Matthieu P. Boisgontier: Conceptualization, Writing – Review and Editing, Supervision, Funding Acquisition.
Acknowledgements
We would like to thank Ata Farajzadeh and Francois Jabouille for their support in data collection. A preprint version of this article has been peer-reviewed and recommended by Peer Community In Health & Movement Sciences: https://doi.org/10.24072/pci.healthmovsci.100187 (Singh, 2025).
Funding
Kayne Park is supported by MITACS and the Banting Research Foundation. Matthieu P. Boisgontier is supported by the Canada Foundation for Innovation (CFI 43661) and the Natural Sciences and Engineering Research Council of Canada (NSERC) (RGPIN-2021-03153).
Conflict of Interest Disclosure
The authors declare that they comply with the PCI rule of having no financial conflicts of interest in relation to the content of the article.
Data, Scripts, Code, and Supplementary Information Availability
Following good research practices (Boisgontier, 2022), data, scripts, code, and supplementary information are available online: https://doi.org/10.5281/zenodo.14879743 (Park & Boisgontier, 2025).